Version
47. Data partitioning (parallel running)
This chapter describes ways to speed up graph runs with help of data partitioning.
| If you’re interested in learning more about this subject, we offer the Parallel Processing course in our CloverDX Academy. |
What is data partitioning
Data partitioning runs parts of graphs in parallel. A component that is a bottleneck of a graph is run in multiple instances and each instance processes one part of the original data stream.
Figure 479. Illustration of parallel run
The processing can be further scaled to cluster without modification to the graph.
When to use data partitioning
Data partitioning is convenient to speed up processing when:
-
components communicate over the network with high latency (HTTPConnector, WebServiceClient);
Benefits of data partitioning
-
Clean design, no duplication. Avoid copying parts of graph to speed-up the processing. Set the number of parallel workers with a single option.
-
Scales to cluster. You can use the same graph on a multi-node cluster without any additional modifications.
-
Maximize use of available hardware. Take advantage of parallel processing on multi-core processors.
-
some components are significantly slower than other components in a graph.
Things to consider when going parallel
-
When you run some component in parallel, you should be aware of limits of hardware and other systems.
-
If you run parallel a component that does many I/O operations (e.g FastSort), you may be limited by speed of hard drive.
-
If you run parallel a component that opens many files (e.g FastSort), you may reach limit on number of opened files.
-
If you run parallel a component that connects to a web service, you may reach the limit of parallel connections to the service or run out of the quota on number of requests.
-
Consider other jobs running on server. Too many jobs running in parallel may slow down run of other graphs.
-
Some tasks cannot be easily parallelized.
1. Parallel components
In Designer and Server, you can speed up processing with copying the slow component and running it in parallel.
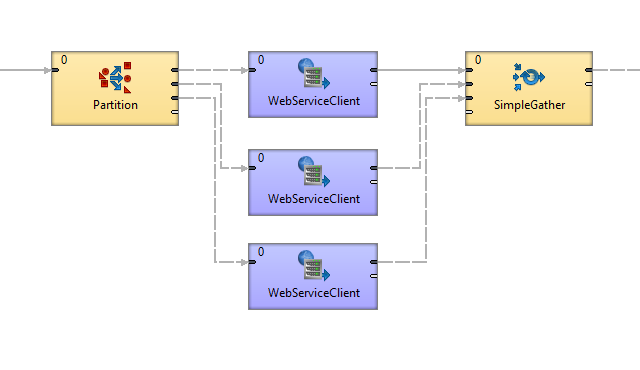
Figure 480. Parallel run
2. Parallel processing in Server
The parallel processing approch offers a more efficient and scalable option to component duplication. By dividing data across multiple workers, you can significantly accelerate job execution without modifying your graph. This method also seamlessly runs in CloverDX cluster.
To use this approach, replace Partition with ParallelPartition and SimpleGather with ParallelSimpleGather.
Set allocation to the components positioned between the cluster components: right click the component and choose Set Allocation.
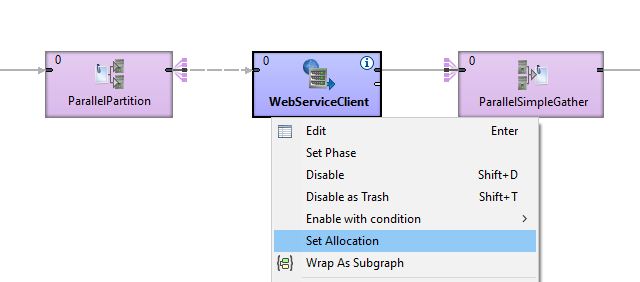
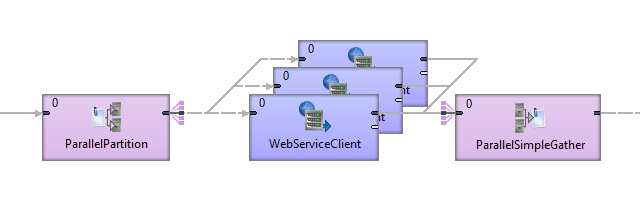
Figure 481. Parallel run with cluster components
In Component Allocation dialog choose By number of workers and enter the number of parallel workers.
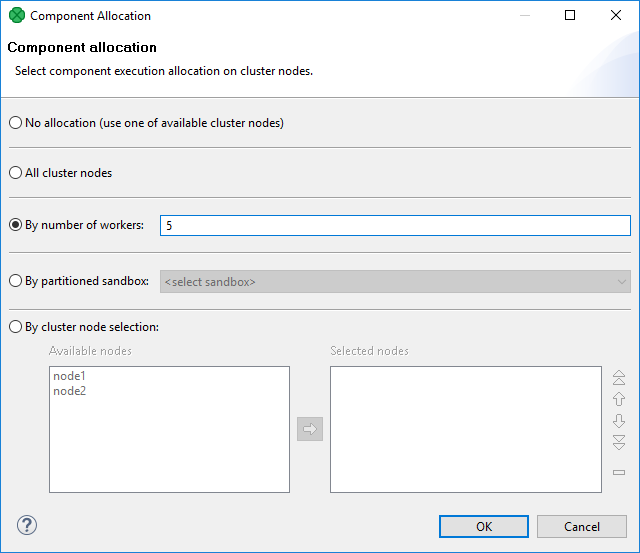
Figure 482. Component allocation
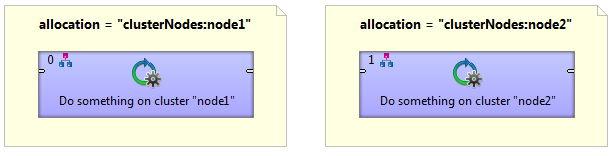
Components in your graph will contain text denoting the allocation.
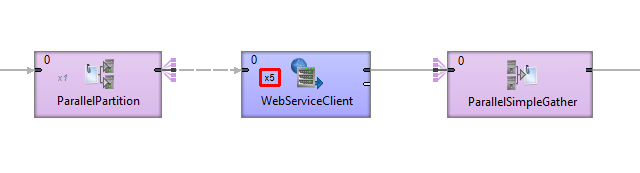
Figure 483. Component allocation
3. Parallel processing in Server cluster
This type of scalability is currently only available for Graphs. Jobflows cannot run in parallel.
When a transformation is processed in parallel, the whole graph (or its parts) runs in parallel on multiple cluster nodes having each node process just a part of the data. The data may be split (partitioned) before the graph execution or by the graph itself on the fly. The resulting data may be stored in partitions or gathered and stored as one group of data.
Ideally, the more nodes we have in a cluster, the more data can be processed in a specified time. However, if there is a single data source which cannot be read by multiple readers in parallel, the speed of further data transformation is limited. In such cases, parallel data processing is not beneficial since the transformation would have to wait for input data.
Graph allocation
Each graph executed in a clustered environment is automatically subjected to a transformation analysis. The object of this analysis is to find a graph allocation. The graph allocation is a set of instructions defining how the transformation should be executed:
First of all, the analysis finds an allocation for individual components. The component allocation is a set of cluster nodes where the component should be running. There are several ways how the component allocation can be specified (see the following section), but a component can be requested to run in multiple instances. In the next step an optimal graph decomposition is decided to ensure all component allocation will be satisfied, and the number of remote edges between graph instances is minimized.
Resulted analysis shows how many instances (workers) of the graph need to be executed, on which cluster nodes they will be running and which components will be present in them. In other words, one executed graph can run in many instances, each instance can be processed on an arbitrary cluster node and each contains only convenient components.

Figure 484. Component allocations example
This figure shows a sample graph with components with various allocations.
-
FlatFileReader: node1
-
Map: node2
-
FlatFileWriter: node1, node2 and node3
-
ParallelPartition can change cardinality of allocation of two interconnected components (detailed description of cluster partitioning and gathering follows this section).
Visualization of the transformation analysis is shown in the following figure:
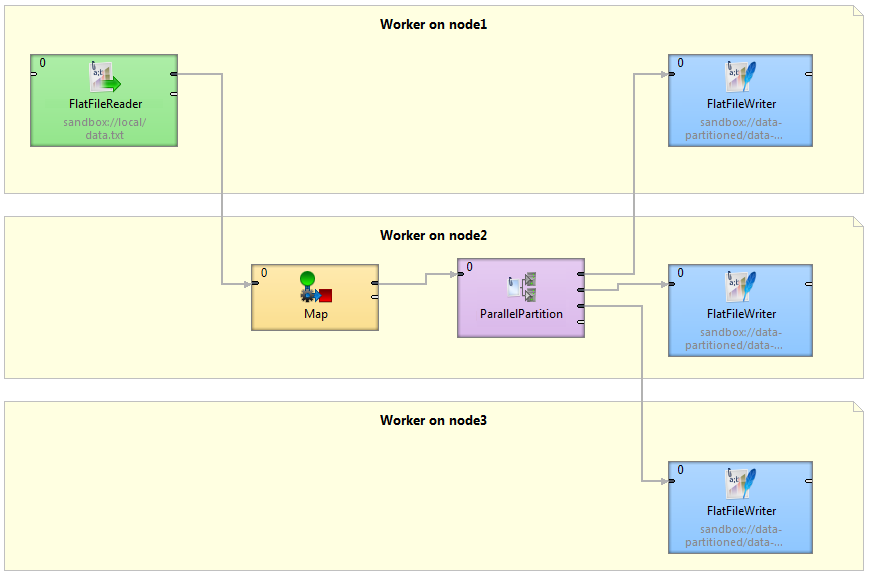
Figure 485. Graph decomposition based on component allocations
Three workers (graphs) will be executed, each on a different cluster node. Worker on cluster node1 contains FlatFileReader and first of three instances of the FlatFileWriter component. Both components are connected by remote edges with components which are running on node2. The worker running on node3 contains FlatFileWriter fed by data remotely transferred from ParallelPartitioner running on node2.
Component allocation
Allocation of a single component can be derived in several ways (list is ordered according to priority):
-
Explicit definition - all components have a common attribute Allocation:
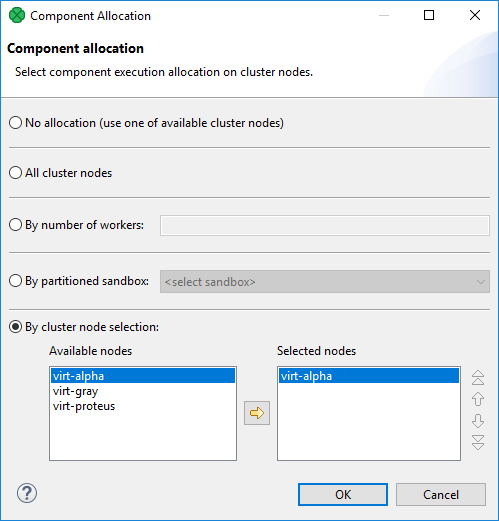 Figure 486. Component allocation dialog
Figure 486. Component allocation dialogThree different approaches are available for explicit allocation definition:
-
Allocation based on the number of workers - the component will be executed in requested instances on some cluster nodes which are preferred by CloverDX cluster. Server can use a build-in load balancing algorithm to ensure the fastest data processing.
-
Allocation based on reference on a partitioned sandbox - component allocation corresponds with locations of given partitioned sandbox. Each partitioned sandbox has a list of locations, each bound to a specific cluster node. Thus allocation would be equivalent to the list of locations. For more information, see Partitioned sandbox in link:../admin/cluster-setup-index.html#id_clustering_sandboxes.
-
Allocation defined by a list of cluster node identifiers (a single cluster node can be used more times)
-
-
Reference to a partitioned sandbox FlatFileReader, FlatFileWriter and ParallelReader components derive their allocation from the
fileURLattribute. In case the URL refers to a file in a partitioned sandbox, the component allocation is automatically derived from locations of the partitioned sandbox. So in case you manipulate with one of these components with a file in partitioned sandbox, a suitable allocation is used automatically. -
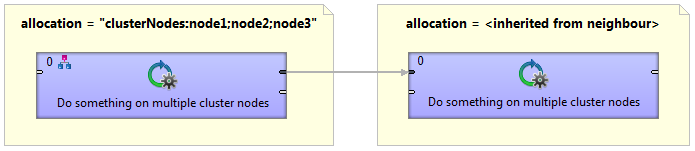
Adoption from neighbor components By default, allocation is inherited from neighbor components. Components on the left side have a higher priority. cluster partitioners and cluster gathers are nature bounds for recursive allocation inheritance.
Partitioning/gathering data
As mentioned before, data may be partitioned and gathered in several ways:
-
Partitioning/gathering "on the fly"
There are six special components to consider: ParallelPartition, ParallelLoadBalancingPartition, ParallelSimpleCopy, ParallelSimpleGather, ParallelMerge, ParallelRepartition. They work similarly to their non-cluster variations, but their splitting or gathering nature is used to change data flow allocation, so they may be used to change distribution of the data among workers.
ParallelPartition and ParallelLoadBalancingPartition work similar to a common partitioner - they change the data allocation from 1 to N. The component preceding the ParallelPartitioner runs on just one node, whereas the component behind the ParallelPartitioner runs in parallel according to node allocation.
ParallelSimpleCopy can be used in similar locations. This component does not distribute the data records, but copies them to all output workers.
ParallelSimpleGather and ParallelMerge work in the opposite way. They change the data allocation from N to 1. The component preceding the gather/merge runs in parallel while the component behind the gather runs on just one node.
-
Partitioning/gathering data by external tools
Partitioning data on the fly may in some cases be an unnecessary bottleneck. Splitting data using low-level tools can be much better for scalability. The optimal case being that each running worker reads data from an independent data source, so there is no need for a ParallelPartitioner component, and the graph runs in parallel from the beginning.
Or the whole graph may run in parallel, however the results would be partitioned.
Node allocation limitations
As described above, each component may have its own node allocation specified, which may result in conflicts.
-
Node allocation of neighboring components must have the same cardinality.
It does not have to be the same allocation, but the cardinality must be the same. For example, there is a graph with 2 components: DataGenerator and Trash.
-
DataGenerator allocated on NodeA sending data to Trash allocated on NodeB works.
-
DataGenerator allocated on NodeA sending data to Trash allocated on NodeA and NodeB fails.
-
-
Node allocation behind the ParallelGather and ParallelMerge must have cardinality 1.
It may be of any allocation, but the cardinality must be just 1.
-
Node allocation of components in front of the ParallelPartition, ParallelLoadBalancingPartition and ParallelSimpleCopy must have cardinality 1.
Graph allocation examples
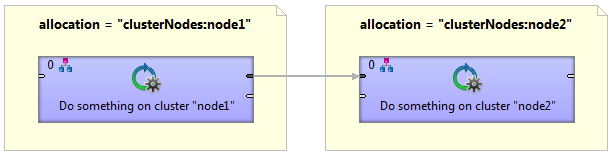
Basic component allocation
This example shows a graph with two components, where allocation ensures that the first component will be executed on cluster node1 and the second component will be executed on cluster node2.
Basic component allocation with remote data transfer
Two components connected with an edge can have a different allocation. The first is executed on node1 and the second is executed on node2. cluster environment automatically ensures remote data records transfer.
Multiple execution
A graph with multiple node allocation is executed in parallel. In this example, both components have a same allocation, so three identical transformations will be executed on cluster node1, node2 and node3.
Cluster data partitioning
A graph with two allocations. The first component has a single node allocation which is not specified and is automatically derived to ensure a minimal number of remote edges. The ParallelPartition component distribute records for further data processing on the cluster node1, node2 and node3.

Cluster data gathering
A graph with two allocations. Resulted data records of parallel data processing in the first component are collected in the ParallelSimpleGather component and passed to the cluster node4 for further single node processing.

Example of distributed execution
The following diagram shows a transformation graph used for parsing invoices generated by cell phone network providers.
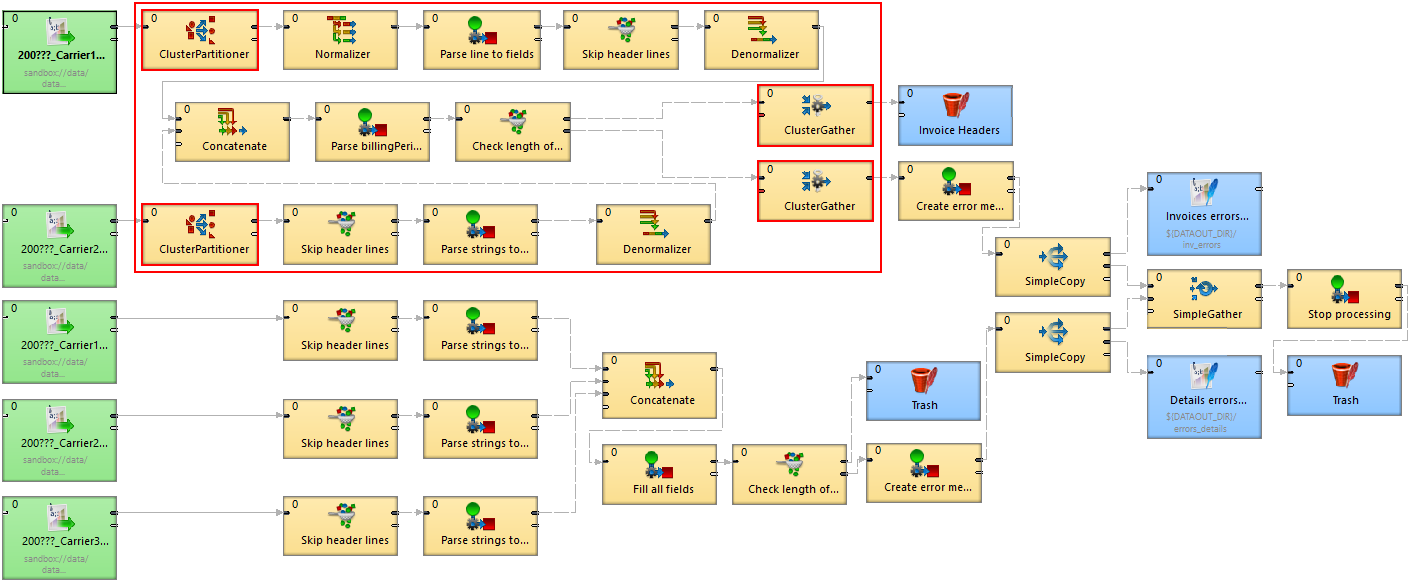
The size of these input files may be up to a few gigabytes, so it is very beneficial to design the graph to work in cluster environment.
Details of the example transformation design
Note there are four cluster components in the graph and these components define a point of "node allocation" change, so the part of the graph demarcated by these components is highlighted by the red rectangle. The allocation of these components should be performed in parallel. This means that the components inside the rectangle should have convenient allocation. The rest of the graph runs on a single node.
Specification of "node allocation"
There are 2 node allocations used in the graph:
-
node allocation for components running in parallel (demarcated by the four cluster components)
-
node allocation for the outer part of the graph which runs on a single node
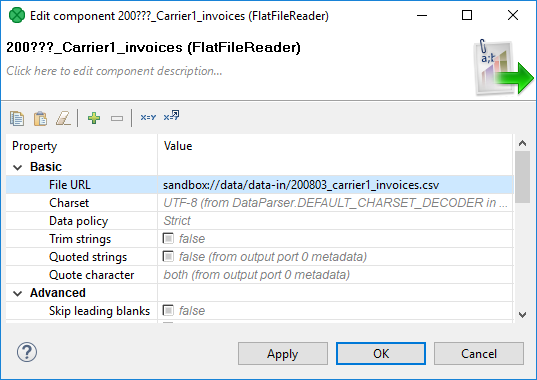
The single node is specified by the sandbox code used in the URLs of input data.
The following dialog shows the File URL value: sandbox://data/path-to-csv-file, where data is the ID of the server sandbox containing the specified file.
And it is the data local sandbox which defines the single node.
The part of the graph demarcated by the four cluster components may have specified its allocation by the file URL attribute as well, but this part does not work with files at all, so there is no file URL. Thus, we will use the node allocation attribute. Since components may adopt the allocation from their neighbors, it is sufficient to set it only for one component.
Again, dataPartitioned in the following dialog is the sandbox ID.
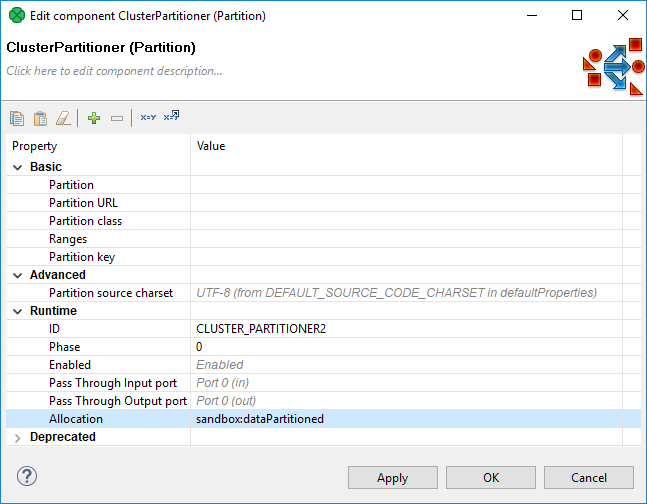
This project requires 3 sandboxes: data, dataPartitioned and PhoneChargesDistributed.
-
data
-
contains input and output data
-
local sandbox (yellow folder), so it has only one physical location
-
accessible only on node
i-4cc9733bin the specified path
-
-
dataPartitioned
-
partitioned sandbox (red folder), so it has a list of physical locations on different nodes
-
does not contain any data and since the graph does not read or write to this sandbox, it is used only for the definition of "nodes allocation"
-
on the following figure, the allocation is configured for two cluster nodes
-
-
PhoneChargesDistributed
-
common sandbox containing the graph file, metadata, and connections
-
shared sandbox (blue folder), so all cluster nodes have access to the same files
-
If the graph was executed with the sandbox configuration of the previous figure, the node allocation would be:
-
components which run only on a single node, will run only on the
i-4cc9733bnode according to the "data" sandbox location. -
components with an allocation according to the dataPartitioned sandbox will run on nodes
i-4cc9733bandi-52d05425.
Scalability of the example transformation
The example transformation has been tested in an Amazon Cloud environment with the following conditions for all executions:
-
the same master node
-
the same input data: 1.2GB of input data, 27 million records
-
three executions for each "node allocation"
-
"node allocation" changed between every 2 executions
-
all nodes has been of "c1.medium" type
We tested "node allocation" cardinality from 1 single node, all the way up to 8 nodes.
The following figure shows the functional dependence of run-time on the number of nodes in the cluster:
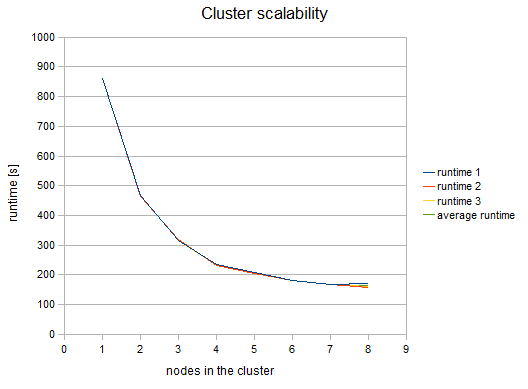
Figure 487. Cluster scalability
The following figure shows the dependency of a speedup factor on the number of nodes in the cluster. The speedup factor is the ratio of the average runtime with one cluster node and the average runtime with x cluster nodes. Thus:
speedupFactor = avgRuntime(1 node) / avgRuntime(x nodes)
We can see, that the results are favorable up to 4 nodes. Each additional node still improves the cluster performance; however, the effect of the improvement decreases. Nine or more nodes in the cluster may even have a negative effect because their benefit for performance may be lost in the overhead with the management of these nodes.
These results are specific for each transformation, there may be a transformation with a much better or possibly worse function curve.
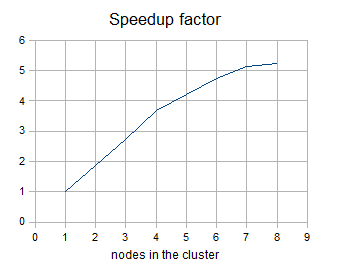
Figure 488. Speedup factor
Table of measured runtimes:
| nodes | runtime 1 [s] | runtime 2 [s] | runtime 3 [s] | average runtime [s] | speedup factor |
|---|---|---|---|---|---|
1 |
861 |
861 |
861 |
861 |
1 |
2 |
467 |
465 |
466 |
466 |
1.85 |
3 |
317 |
319 |
314 |
316.67 |
2.72 |
4 |
236 |
233 |
233 |
234 |
3.68 |
5 |
208 |
204 |
204 |
205.33 |
4.19 |
6 |
181 |
182 |
182 |
181.67 |
4.74 |
7 |
168 |
168 |
168 |
168 |
5.13 |
8 |
172 |
159 |
162 |
164.33 |
5.24 |
Partitioned sandboxes in Server cluster
In CloverDX Server cluster, you can partition files with temporary data to multiple cluster nodes using Partitioned sandboxes. A file stored in a partitioned sandbox is split into several parts. Each part of the file is on a different cluster node. This way, you can partition both: processing and data. It reduces amount of data being transferred between nodes.